Projekty
Artykułu opisujące projekty Pitlaba
Czujnik prądu mierzy prąd o natężeniu do 60A i napięciu do 36V. Zawiera zintegrowane 2 BEC-e:
- 12,0V o obciążalności prądowej 2A,
- 5,3V o obciążalności prądowej 4A.
BEC-e pracują jako impulsowe przetwornice step-down, czyli obniżające napięcie, dlatego powinny być zasilane napięciem wyższym niż 12V ale nie przekraczającym 36V (4-8 ogniw litowych: LiPol, Li-ion, LiFePO4).
Czujnik prądu może być stosowany zamiennie z dotychczasowymi czujnikami prądu. W przeciwieństwie do starszej wersji montowanej na dodatnim przewodzie zasilania, obecna wersja wymaga obu przewodów prądowych, gdyż nie tylko mierzy prąd, ale też czerpie z nich energię.
BEC może współpracować ze starszą wersją OSD.
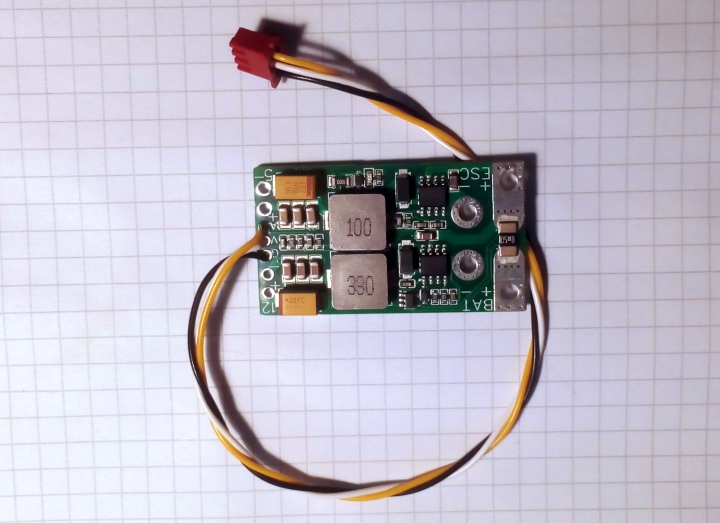
Wymiary płytki: 49x28mm
Masa: 13g
Długość przewodu: 20cm
We wcześniejszych wersjach Systemu FPV, OSD i Autopilot były osobnymi urządzeniami. W wersji 4, funkcjonalność obu urządzeń została zintegrowana na jednej płytce z wielokrotnie wydajniejszym, dwurdzeniowym procesorem i wbudowanym IMU.
Urządzenie nazwane teraz OSD&AP zawiera szereg nowych funkcjonalności:
- obsługuje dwie kamery pracujących w standardzie PAL lub NTSC,
- współpracuje z cyfrowymi systemami FPV HD: Avatar, HDzero, DJI,
- nawigacja po menu na ziemi i w trybie AUTO jest realizowana za pomocą drążków aparatury a nie klawiatury jak wcześniej.
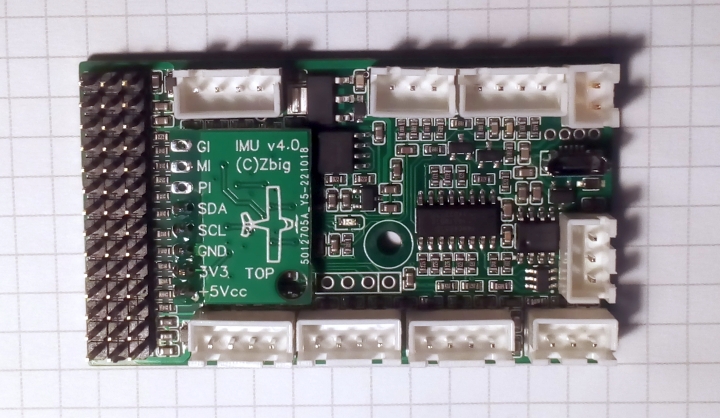
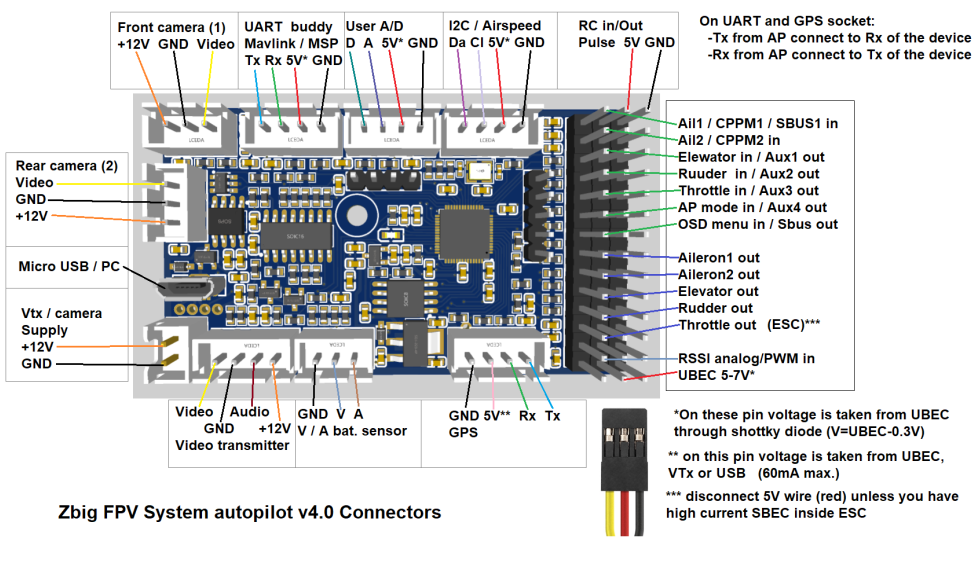
Złącza zachowują układ analogiczny jak w poprzedniej wersji, tak aby można było wykorzystywać dotychczasowy osprzęt taki jak czujnik temperatury, prądu czy prędkości względem powietrza, radiomodem Buddy Flight. Zmienione jest jedynie złącze USB z mini na micro USB. Wszystkie złącza są dostępne od góry aby ułatwić dostęp po zabudowie w modelu. Nie trzeba już robić okna w kadłubie modelu aby podłączyć kabel USB. Obie części urządzenia OSD i AP konfigurowane są z jednego gniazda. Konfiguracja dostępna dotychczas tylko w menu OSD jest również dostępna w FPV Managerze.
wymiary płytki: 65x38mm
masa płytki: 17,4g
 System Hermes jest dedykowany do sterowania modelami i dronami wyposażonymi w kontroler lotu, gdzie wymagany jest większy niż standardowy zasięg radiowy i wysokie bezpieczeństwo transmisji.
System Hermes jest dedykowany do sterowania modelami i dronami wyposażonymi w kontroler lotu, gdzie wymagany jest większy niż standardowy zasięg radiowy i wysokie bezpieczeństwo transmisji.
Zastosowano tu innowacyjną technikę modulacji LoRa, która zapewnia ultra daleki zasięg i stabilność sterowania nawet przy niewielkiej mocy nadawania. Pozwala na loty na małej wysokości, na granicy widoczności optycznej (ograniczenia wynikającej z kulistości Ziemi).
Nadajnik pracuje z mocą regulowaną w 3 krokach w zakresie od 80mW do 1W (domyślnie 80/200/500mW). Moc cyklicznie przełącza się przyciskiem "Mode" w nadajniku lub zdefiniowanym kanałem RC.
Testy potwierdziły stabilny zasięg 14 km przy wysokości anteny odbiorczej 80m przy 50mW mocy nadawania, oraz 30km przy wysokości anteny 240m i mocy 200mW.
Modulacja LoRa pozwala na odbiór sygnałów nawet poniżej poziomu szumów i zakłóceń od innych nadajników, urządzeń przemysłowych, radiostacji, systemów monitoringu (tzw. „smog elektromagnetyczny”). Analiza mocy odbieranego sygnału jest możliwa dzięki obecności sygnału RSSI, który może być prezentowany jako stan jednego z kanałów RC lub PMW na osobnym złączu.
Hermes przesyła dane sterujące na 5 definiowanych przez użytkownika kanałach, które są dynamicznie przełączane. Pozwala to ominąć zakłócone kanały i szybko przywrócić sterowanie modelem. Indywidualny wybór kanałów umożliwia optymalne wykorzystanie anten w okolicy częstotliwości przy której mają one największą efektywność
Hermes obsługuje najpopularniejsze standardy sygnału sterującego: CPPM (12 kanałów) oraz SBUS (16 kanałów). Posiada dwa tryby Fail-Safe: „kopterowy” (brak sygnału CPPM/SBUS) oraz „predefiniowane wartości kanałów”. Idealnie współpracuje z kontrolerami lotu, np. Pitlab FPV system, Dedalus czy Pixhawk. System przesyła informacje wszystkich kanałów RC w jednej paczce danych, dzięki temu wszystkie sygnały są zawsze spójne (np. informacje sterujące trybem pracy autopilota), co jest krytyczne na granicy zasięgu, gdy część paczek danych może zostać utracona.
Do nadajnika można zbindować dowolną liczbę odbiorników wykorzystując przyciski w obu urządzeniach. Po zbindowaniu odbiornik pracuje tylko z konkretnym nadajnikiem nawet jeżeli w pobliżu pracują inne nadajniki.
UWAGA: Tryb ultra dalekiego zasięgu z modulacją LoRa uzyskuje wysokie parametry zasięgu i odporności na zakłócenia kosztem ograniczonej szybkości przesyłania danych, dlatego w tym trybie nie ma możliwości przesyłania danych telemetrycznych z modelu na ziemię, a całe dostępne pasmo transmisji jest wykorzystane dla zapewnienia płynności sterowania modelem.
Konfigurację parametrów pracy systemu oraz aktualizację oprogramowania wykonuje się programem "Hermes Configurator" dostępnym na stronie Do pobrania. Nadajnik i odbiornik posiadają 4-szpilkowe złącze UART typu JST gdzie należy podłączyć konwerter USB-UART lub odpowiednio skonfigurowany moduł bluetooth. Zasilanie podczas konfiguracji może być podane przez złącze zasilania lub przez UART, napięcie zasilające ze strony UART-a powinno wynosić 5V. Do zasilania nadajnika przeznaczone jest gniazdo JST, do którego można podpiąć bezpośrednio pakiet 3S poprzez wtyczkę balansera (z odpowiednią przejściówką również pakiet 2S lub 4S).
Odbiornik zasilany jest standardowym 3-przewodowym kabelkiem RC ze wspólnej magistrali zasilania serwomechanizmów. Szeroki zakres dopuszczalnych napięć zasilających gwarantuje odporność na wahania i spadki napięcia na szynie zasilającej, nawet przy spadku napięcia UBEC aż do 2.5V.
| Parametr | Nadajnik | Odbiornik | Jednostka |
| Maksymalna moc nadajnika | +30 | dBm | |
| Zakres napięcia zasilania | 5..18 (typ. 3S) | 2,5..12 (typ 5V) | V |
| Pobór prądu (dla mocy 80 / 200 / 500mW) | 120 / 170 / 270 | 15 | mA |
| Masa bez anteny | 70 | 12 | g |
| Rozmiary (Dług x Wys x Szer) | 64 x 75 x 29 | 61 x 21 x 10 | mm |
Dokumentacja
Aktualizacja oprogramowania
Oprogramowanie i firmware
- Dodano nowe okno dla skanera pokazujące sygnał i szum tła z większą rozdzielczością.
- Poprawiony błąd specyficzny dla wersji 868MHz, który mógł powodować wysyłanie ramek ze zbyt krótką preambułą
- Zalecana jest aktualizacja bootloadera (ma wpływ na pracę skanera ale nie jest wymagane do normalnej pracy). Sposób wykonania aktualizacji jest opisany w dokumentacji.
- Pobierz pliki
- Przejście z fazy testowej do komercyjnej
- Pobierz pliki
Ostatnio miałem wywrotkę na rowerze i w rezultacie wylądowałem w szpitalu. Oczekuję na operaję i przez najbliższy czas nie jestem w stanie obsłużyć zamówień. Proszę o wyrozumiałość, zaległości będę nadrabiał gdy wrócę do domu.
Podkategorie
Komputer pokładowy Liczba artykułów: 30
Zagadnienia związane z komputerem pokładowym AutoPitLot
Wariometr SkyAssistant Liczba artykułów: 8
Zagadnienia związane z wariometrem SkyAssistant
System FPV Liczba artykułów: 14
Zawiera informacje o systemie przeznaczonym d lotów FPV skłądajacym się z OSD (On Screen Display) czyli graficznej nakładki na obraz przesyłany z kamery, Autopilota dla bezzałogowych systemów latających oraz stacji naziemnej odbierającej telemetrię z bezzałogowego samolotu, wyposażonej w sterownik anteny śledzącej, diversity i loger.
Interfejs FMS Liczba artykułów: 4
Zagadnienia związane z interfejsem do modelarskiego symulatora FMS
Diversity RC Liczba artykułów: 1
Naglowki do zakladek Liczba artykułów: 5
Firma Liczba artykułów: 8
Zagadnienia związane z działalnością firmy Pitlab
Autopilot Dedalus Liczba artykułów: 3
Hermes Liczba artykułów: 1
