Quadrokopter PW wykorzytuje ramę koptera konkurencji. Ogólnie zgrabna i lekka konstrukcja, jedynym mankamentem są delikatne nogi, które łatwo uszkodzić gdy umiejętności pilotażu nie są jeszcze zbyt duże. Sposób montażu nóg nie zapewnia dobrego pozycjonowania platformy, przez co ciężko jest poprawnie skalibrować IMU po montażu na kopterze.
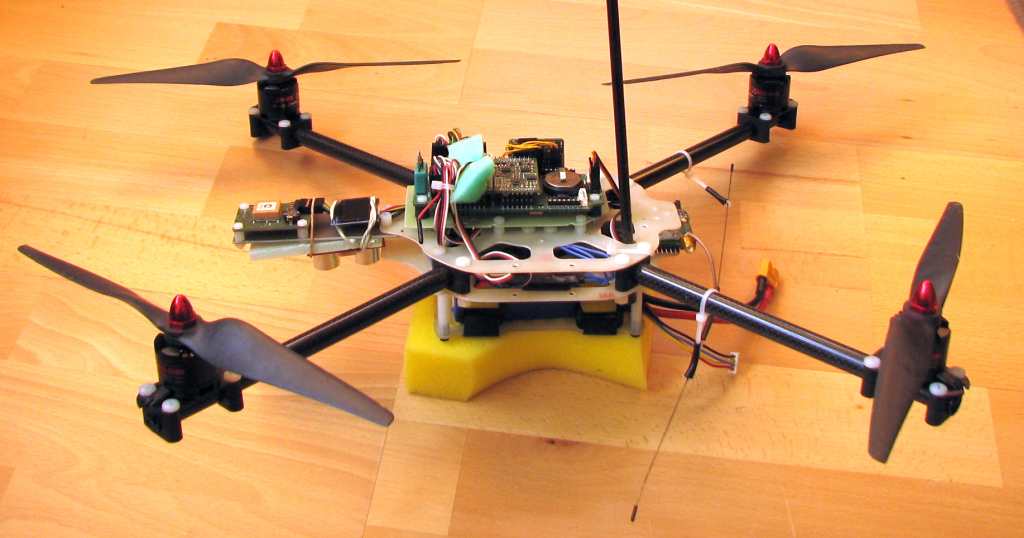
Wyposażenie quadrokoptera PW
| Element wyposażenia | Opis | Źródło zakupu |
|---|---|---|
| Pakiet | LiPo 3S 2200mAh | Hobbyking: Turnigy 2200mAh 3S 20C Lipo Pack |
| Czujnik prądu | 35A 36V | Pitlab: Czujnik prądu 35A |
| Regulatory silników | IFlight 30A, trochę przewymiarowane, ale wybrane ze względu na zgodność złącz Gold3,5mm z zakończeniami silników. | ABC-RC: ESC iFlight iQSS-30A 400Hz - SimonK firmware - fast PWM do quadcopterów - złacza Gold 3,5mm |
| Silniki | Roxxy 2827/26 | Robbe: ROXXY BL Outrunner 2827/26 |
| Śmigła | APC 10x3,8 |
ABC-RC: Śmigło APC 10x3,8 SFP - LP10038SFP - Pusher + Śmigło APC 10x3,8 SF - LP10038SF |
| Rama | Rama laminatowa z aluminiowymi ramionami | RRConcept: Rama Hornet-X4L |
| Sterownik | Komputer pokładowy Autopitlot + IMU Invensense + Moduł pneumatyczny | Pitlab |
| Odbiornik GNSS | Pitlab: Moduł GPS z magnetometrem HMC5883 | |
| Łącze komunikacyjne | moduł bluetooth krótkiego zasięgu | Pitlab: Moduł bluetooth UART |
| Interfejs użytkownika | Wyświetlacz OLED | RCTimer po modyfikacji |
| Link RC | Nadajnik Futaba, odbiornik Robbe R6007SP z szeregowym wyjściem PPM | OlPen: Odbiornik Futaba R6007SP 7-kanałowy 2,4GHz RASST odbiornik Serial |
| Zasilanie | BEC jednego z ESC | |
| Oświetlenie | brak |
Parametry eksploatacyjne
Masa RTF: ? g
Prąd zawisu: 9,48 A
