Moduł z interfejsem bluetooth jest to bezprzewodowe łącze komunikacyjne krótkiego zasięgu. Jest bardzo wygodny, ponieważ można skomunikować się z komputerem pokładowym bez konieczności fizycznego dostępu do niego i podłączania wtyczek.
Tak wygląda interfejs bluetooth UART zainstalowany w quadrokopterze (przyklejony dwustronnie klejącą pianką):
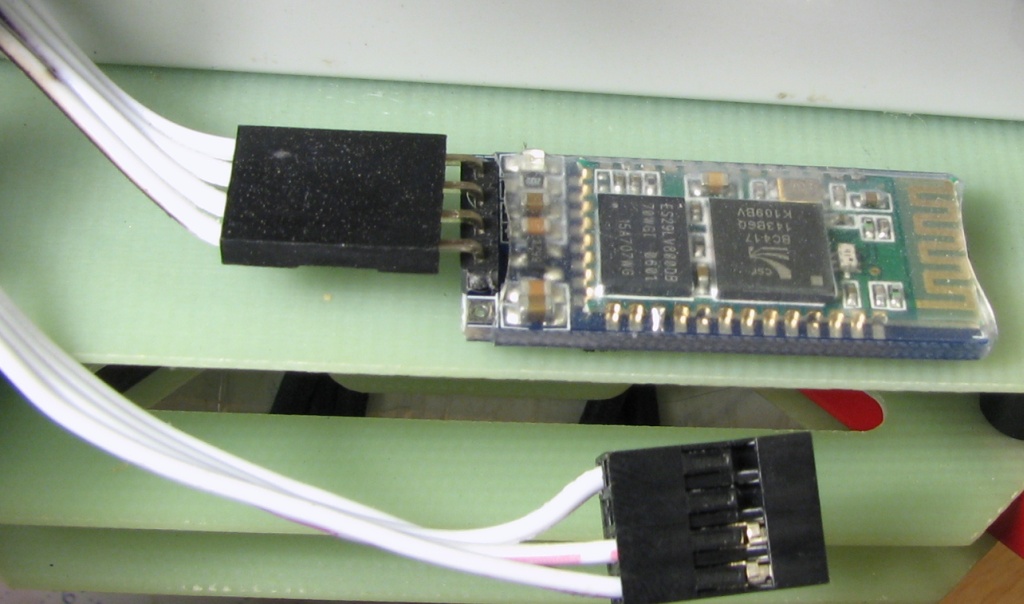
Przedstawiony powyżej moduł pochodzi z Chin, można go kupić na aukcjach Ebay czy Allegro. Może on pracować w dwu trybach:
- tryb konfiguracji sygnalizowany migającym LEDem, wtedy przyjmuje konfigurujące go polecenia AT.
- tryb komunikacyjny gdzie pracuje jako bezprzewodowy UART, sygnalizowany ciągłym świeceniem się LEDa. Prędkość komunikacji jest programowalna przez użytkownika.
W zależności od sprzedawcy może przyjść zaprogramowany na różną prędkość pracy w trybie komunikacyjnym. U mnie to było 9600bps. Aby przekonfigurować go na prędkość 115200bps obsługiwaną przez AutoPitLota należy podłączyć go do terminala za pomocą dowolnego łącza szeregowego pracującego na poziomach logicznych 3,3V. Ja używam do tego celu kabelka z układem FTDI. Po podłączeniu i uruchomieniu terminala skonfigurowanego na prędkość 38400bps moduł powinien odpowiadać "OK" na podane mu znaki "AT" (koniecznie wielkimi literami, bez CR LF na końcu).
Gdy jest już nawiązana komunikacja wtedy trzeba podać polecenie zmiany prędkości o składni: AT+BAUDx gdzie x to liczba odpowiadająca prędkości pracy podana w poniższej tabeli.
| Polecenie | Odpowiedź | Uwagi |
|---|---|---|
| AT | OK | |
| AT+VERSION | Linvor1.5 | Zwraca numer wersji modułu |
| AT+BAUDx | OKyyyy | Ustawia prędkość transmisji do interfejsu BT x może przybierać następujące wartości: 1 dla 1200 bps 2 2400 bps 3 4800 bps 4 9600 bps 5 19200 bps 6 38400 bps 7 57600 bps 8 115200 bps 9 230400 bps A 460800 bps B 921600 bps C 1382400 bps |
| AT+NAMEnazwa | OKnazwa | Zmiana nazwy urządzenia. Nazwa może mieć długość do 20 znaków |
| AT+PINxxxx | OKpin | Ustawianie PINu parującego urządzenia. Domyślnie 1234 |
Ponieważ moduł ma nietypowy sposób obsługi poleceń AT bazujący na timeoutach a nie na oczekiwaniu na znak, najlepiej jest przygotować gotowy ciąg znaków np. "AT+BAUD8" i wkleić je w okno terminala.
Moduł Bluetooth UART jest dostępny w PitLab.Sklepie są domyślnie skonfigurowane do pracy z komputerem pokładowym i zaprogramowane na prędkość 115200bps.
Najprawdopodobniej komputer pokładowy będzie pracował z każdym innym modułem Bluetooth o ile ten będzie pracował w trybie "przezroczystym" jako port szeregowy.
Sposób połączenia modułu ze złączem modułów zewnętrznych "MOD" jest przedstawiony w tabeli:
| pin | złącze MOD | wyjścia modułu Bluetooth |
|---|---|---|
| 1 | TXD1 | RXD |
| 3 | RXD1 | TXD |
| 5 | CTS1 | RTS lub nie podłączony |
| 7 | RTS1 | CTS lub nie podłączony |
| 2 | Vin | Vcc |
| 4 | Module ID | Oporniki 2k+1k połączone równolegle, drugim końcem do GND |
| 6 | GND | Do oporników z pinu "Module ID" |
| 8 | GND | GND |
Moduł Bluetooth od strony PC

Z drugiej strony łącza w komputerze PC powinien znajdować się moduł bluetooth. Jeżeli nie ma go w wyposażeniu standardowym, wtedy wystarczy dokupić zewnętrzny interfejs Bluetooth na port USB. Do komunikacji w odległości kilku metrów wystarczy praktycznie dowolny interfejs, często wielkości paznokcia. W taka małym module trudno zmieścić rozsądną anten więc ich zasięg jest ograniczony. Jeżeli zależy nam trochę większym zasięgu rzędu dziesiątek metrów polecam trochę większe moduły z zewnętrzną anteną, takie jak na obrazku obok.
Instalacja ewentualnego modułu na PC polega na dodaniu portu do wykrytego przez system urządzania Bluetooth. Dodawanie portu robi się w "Panelu sterowania" -> "Urządzenia Bluetooth" -> zakładka "Porty COM". Dodając port wybieramy port wychodzący. Urządzenie będzie potrzebowało sparować się z PC. Kod parowania to "1234".
Tak wybrany port powinien pojawić się w "Menadżerze urządzeń". Konfiguruje się go jak każdy inny port.
Zalecane ustawienia to 115200, 8N1, brak kontroli sterowania przepływem.

