![]()
Polecamy produkty FPV


Czym jest FPV OSD
OSD jest skrótem od On Screen Display co znaczy wyświetlanie dodatkowych informacji na ekranie z obrazem wideo. Jest to instrument pokładowy zdalnie sterowanego samolotu (RC) wyposażonego w kamerę wideo. Nakłada informacje pomocnicze dla pilota na obraz radiowo transmitowany z kamery. Dzięki OSD by Zbig & Pitlab pilot patrząc na obraz z kamery oprócz widoku z modelu zna bieżący stan samolotu, na który składa się położenie (współrzędne geograficzne z GPS), wysokość, kompas, parametry instalacji elektrycznej, kierunek i odległość do domu a w połączeniu z autopilotem sztuczny horyzont, prędkość względem powietrza i wariometr.
Dzięki OSD łatwiej jest dolecieć tam gdzie trzeba i bezpiecznie wrócić do domu nawet w nieznanym terenie czy przy ograniczonej widoczności.
OSD jest nieodzownym wyposażeniem modelu FPV, czy sterowanego na podstawie obrazu przesyłanego z kamery. Sposób latania FPV czyli First Person View, oznacza sterowanie z punktu widzenia osoby wirtualnie znajdującej się wewnątrz sterowanego modelu.
OSD pełni również rolę interfejsu użytkownika dla autopilota umożliwiając wprowadzanie zmian nawet w trakcie lotu za pomocą wolnego kanału aparatury. Na ziemi gdy mamy fizyczny dostęp do urządzenia nastawy wygodnie będzie wykonać przy pomocy klawiatury dołączonej do zestawu.
Układy ekranu OSD
RC OSD ma 4 edytowalne przez użytkownika układów ekranów zawierających różne elementy graficzne. Użytkownik może zmieniać położenie, włączać i zmieniać parametry wszystkich elementów graficznych widzianych na ekranie a w czasie lotu może przełączać miedzy ekranami OSD za pomocą wolnego kanału w aparaturze RC. Na obrazkach poniżej kolejno układ ekranu wzorowany na myśliwcu F16, historycznie pierwszy układ Mega644 oraz pozostałe dwa układy.




Przy użyciu oprogramowania FPV Manager dostępnego na stronie można zmieniać położenie, widoczność i atrybuty wszystkich obiektów, dostosowując układ ekranu do własnych upodobań.
Znaczenie elementów ekranu OSD
|
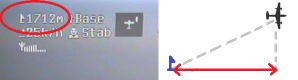
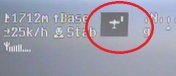
Odległość od bazy liczona po ziemi UWAGA: Jest mniejsza niż odległość w linii wzroku (LOS) |
Graficzny wskaźnik położenia lotniska (bazy) lub kolejnego punktu trasy. Położenie bazy należy interpretować tak, jak byśmy lecieli w samolocie, czyli na tym rysunku baza jest około 45 stopni na prawo i o taki kąt należy skręcić w prawo aby dolecieć do bazy. |
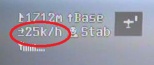
Tekstowy wskaźnik prędkości modelu względem ziemi (prędkość podawana przez GPS) |
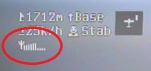 Wskaźnik poziomu sygnału RC (RSSI). Może również pokazywać poziom sygnału liczbowo w procentach. |
Kurs modelu:
|
Punkt docelowy podczas lotu autonomicznego:
|
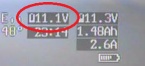
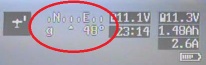
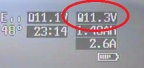
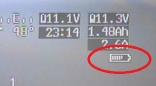
Napięcie pakietu video, oraz graficzny wskaźnik rozładowania, bazujący na napięciu pakietu i ustawionym alarmie napięcia rozładowania |
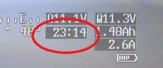
Czas (minuty, sekundy) liczony od momentu włączenia OSD lub ręcznego wywołania funkcji menu "Ustaw bazę" |
Napięcie pakietu napędowego, oraz graficzny wskaźnik rozładowania, bazujący na napięciu pakietu i ustawionym alarmie napięcia rozładowania. Wymaga podłączenia czujnika prądu |
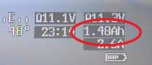
W zależności od ustawienia jest to pojemność wyczerpana z pakietu, albo pojemność pozostała w pakiecie (wymaga ustawienia właściwej pojemności pakietu). Wymaga połączenia czujnika prądu. |
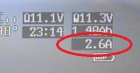
Prąd pobierany aktualnie z pakietu napędowego. Wymaga podłączenia czujnika prądu. Pole pokazuje prądy powyżej 0,3A. maksymalna wartość mierzonego prądu zależy od zakresu zastosowanego czujnika. UWAGA: czujnik prądu wymaga kalibracji w menu serwisowym |
Graficzny wskaźnik rozładowania baterii napędowej. W zależności od ustawienia może pokazywać:
|

Graficzny wskaźnik prędkość modelu. W zależności od ustawień może pokazywać:
|

Graficzny wskaźnik wysokości względem poziomu lotniska. W zależności od ustawień bazuje na:
|

Graficzny wskaźnik szybkości wznoszenia i opadania (wariometr). Funkcjonuje tylko z barometrycznym czujnikiem wysokości z autopilota. Długość linii oraz kierunek przesunięcia strzałki wskazuje pionową prędkość modelu |
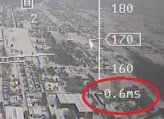
Tekstowy wskaźnik wznoszenia lub opadania modelu (wariometr). Pokazuje pionową prędkość modelu w metrach na sekundę (dla jednostek imperialnych w stopach na minutę) |
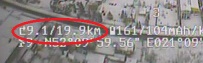
Statystyka lotu. Pole pokazuje trasę (drogę) pokonana do tej pory przez model (tutaj 9,1 km), oraz szacowana trasę którą można jeszcze pokonać na pozostałej pojemności pakietu (tutaj 19.9km), przy utrzymaniu dotychczasowego średniego zużycia prądu. Trasa możliwa do pokonania jest orientacyjna i może zmienić się radykalnie np. po skręcie pod wiatr lub locie na innym poziomie gazu |
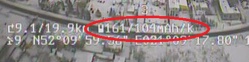
Statystyka zużycia prądu na każdy kilometr pokonanej trasy. Pierwsze pole pokazuje średnie zużycie pojemności pakietu na każdy kilometr trasy (tutaj 161 mAh/km), za cały dotychczasowy lot. Drugie pole pokazuje aktualne zużycie prądu w danej chwili (tutaj 104 mAh/km) |
Ilość śledzonych satelitów systemu GPS. Im większa ilość satelitów, tym dokładniejszy pomiar położenia, prędkości oraz kursu modelu. Problemy z nawigacją GPS (łapaniem FIX-a) oraz małą ilością śledzonych satelitów mogą być spowodowane zakłóceniami np. od nadajnika AV, kamery lub innych elementów zestawu FPV |

Temperatura. W zależności od ustawienia może pokazywać temperaturę czujnika na płytce autopilota (temperaturę wewnątrz kabiny modelu), albo po zastosowaniu dodatkowego, zewnętrznego czujnika LM335 pokazywać temperaturę otoczenia |

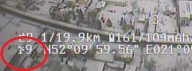
Wysokość oraz szerokość geograficzna aktualnego położenia modelu. Do wyboru są 3 typowe sposoby prezentowania współrzędnych geograficznych. Pozwala na odnalezienie zagubionego modelu. UWAGA: Należy wybrać taki sposób prezentacji, jaki mamy używany w swoim urządzeniu nawigacyjnym (Pocket PC z nawigacja, smartfon z GPS itd.), dzięki temu unikniemy niepotrzebnej frustracji i problemów z przeliczaniem formatu współrzędnych w sytuacji awaryjnej |

Data i czas odczytane z GPS (pokazywane naprzemiennie). Należy pamiętać o ustawieniu właściwej strefy czasowej, aby uniknąć przesunięcia wskazywanego czasu |

sztuczny horyzont. Pokazuje przechył oraz pochylenie modelu. W zależności od ustawień może pokazywać również skalę stopniową pochylenia. Krótsza kreska wskazuje symbolicznie kierunek do ziemi (istotne np. w locie odwróconym lub gdy w kadrze widać samo niebo) |

Znacznik centralny. Jest to punkt odniesienia dla sztucznego horyzontu, pozwala na szybkie stwierdzenie, czy model ma opuszczony, czy tez zadarty do góry dziób |

Punkty trasy na radarze: H – położenie punktu bazy (Home) 1..9 – położenie kolejnych zdefiniowanych punktów trasy. Wyświetlanie radaru pozwala na ręczny lot po punktach trasy oraz zapewnia lepsza orientacje w przestrzenii albo wyznaczenie bezpiecznego obszaru lotów |
Wizualizacja pasa lotniska (prostokąt ciągła linią) i ścieżki podchodzenia do pasa (dwie kropkowane linie) |

Znacznik systemu ILS pokazujący odchylenie w poziomie i w pionie od optymalne ścieżki podchodzenia do lądowania na danym lotnisku |

OSD w locie FPV:
|
|
|
|
|
|
|
|
|
Złącza OSD
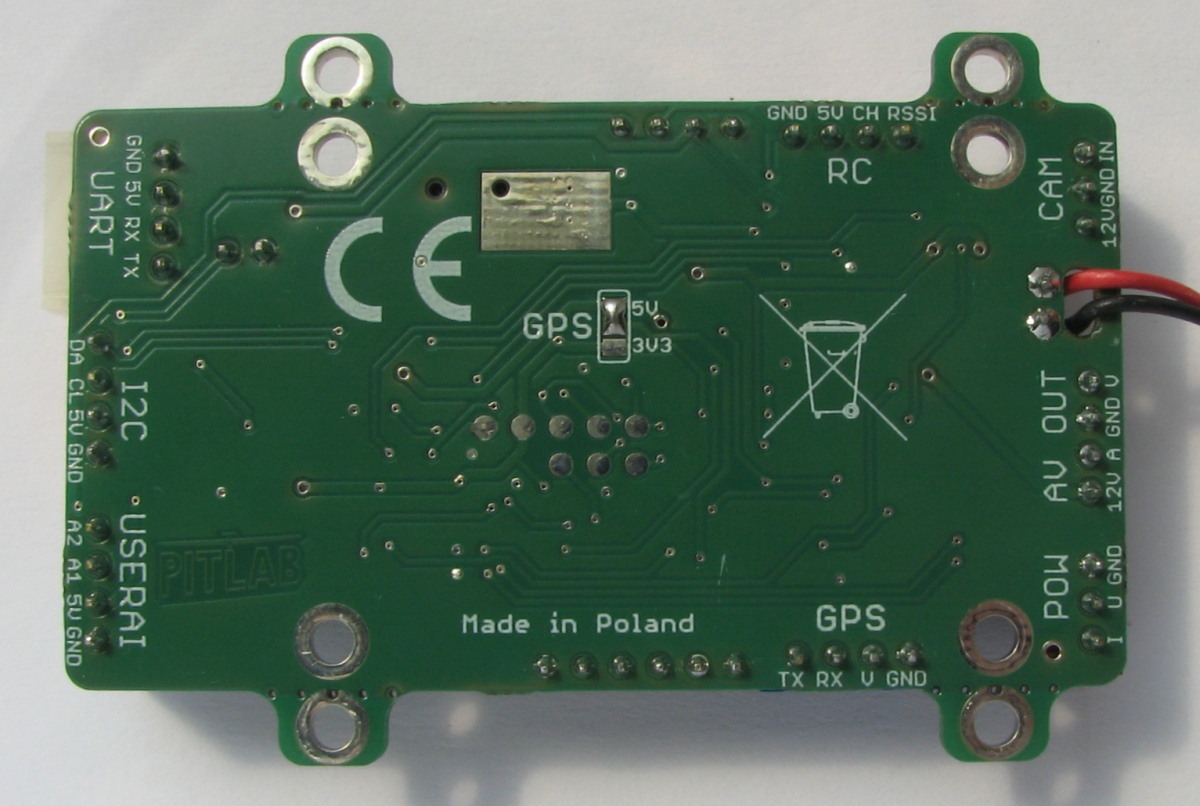
Znaczenie złącz oraz rozkład sygnałów na złączach jest następujący (kliknij aby powiększyć):

Zasilanie OSD
OSD ze względu na konieczność zasilania takich elementów jak kamera, nadajnik, odbiornik GPS, czujniki zewnętrzne oraz wewnętrzne obwody ma rozbudowany układ zasilania. W obecnej wersji można wybrać napięcie zasilania modułu GPS:
- Zwora "GPS" umożliwia wybór zasilania dla modułu odbiornika GPS. Można wybrać zasilanie z 3,3 V lub 5 V. Moduły odbiorników dostępne w Pit.Lab.Sklepie są zasilane napięciem 5 V (mają wewnętrzny stabilizator 3,3 V). Część odbiorników GPS nie posiadających stabilizatora wymaga zasilania 3,3V. W takim przypadku należy przenieść kroplę cyny łączącą górny i środkowy pad zwory na dolny i środkowy.
- W przypadku gdy OSD jest połączone z AP, wtedy GPS podłączany jest to płytki AP, więc należy ustawić analogiczną zworę na płytce AP.
Wymiary OSD