![]()
Polecamy produkty FPV



Autopilot jest częścią projektu systemu FPV. Jego zadaniem jest stabilizacja i zapewnienie lotu autonomicznego w sytuacjach gdy pilot nie jest w stanie kontynuować lotu na przykład w przypadku utraty zasięgu radiowego (zarówno wizji jak i sterowania modelem). W takiej sytuacji autopilot rozpoczyna autonomiczny lot do bazy ratując nas przed utratą modelu.
Autopilot posiada 3 tryby pracy sterowne wolnym kanałem aparatury:
- Tryb transparentny (OFF), gdzie sygnały sterujące z odbiornika są przekazywane bezpośrednio na serwa,
- Tryb stabilizacji (STAB), gdzie użytkownik steruje lotem ale autopilot aktywnie stabilizuje model pozwalając użytkownikowi na zajęcie się misją, np. robieniem zdjęć.
- Tryb autonomiczny (AUTO), gdzie autopilot stabilizuje i steruje modelem do następnego zdefiniowanego punktu na mapie (ostatnim punktem zawsze jest baza).
Tryb autonomiczny ma 3 podrzędne tryby pracy zależne od położenia drążka gazu:
- Gaz na minimum oznacza że autopilot ma przerwać misję i wrócić do bazy
- Gaz w połowie zakresu oznacza że autopilot kontynuuje misję lecąc do kolejnych waypointów. Po zakończeniu wraca do bazy.
- Gaz ma maksimum oznacza że autopilot ma krążyć wokół aktualnej pozycji (przydatne w sytuacji gdy np. trzeba odebrać pilny telefon).
Pod względem sprzętowym autopilot jest wyposażony w pełną jednostkę inercyjną: 3-osiowy żyroskop, 3-osiowy akcelerometr, 3-osiowy magnetometr oraz czujnik ciśnienia.
Odczytuje 7 kanałów sterujących z odbiornika RC, również w w formacie szeregowym PPM oraz S-Bus. Steruje 5 kanałami wyjściowymi (4 serwa i regulator silnika) równolegle lub przez magistralę S-Bus.
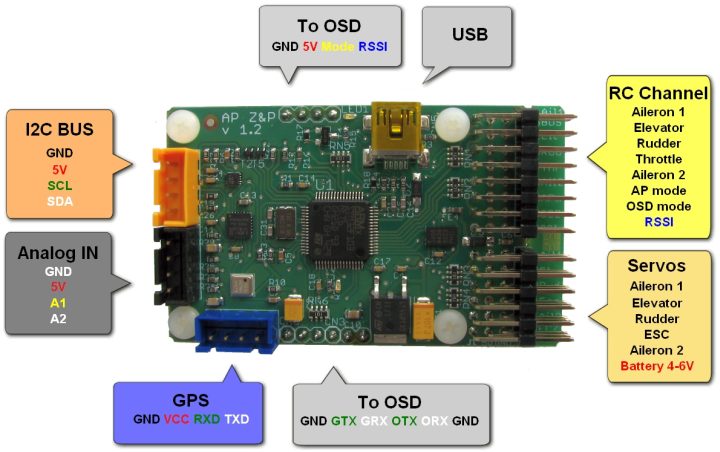
Złącza
Znaczenie złącz oraz rozkład sygnałów na złączach jest następujący:
{kind=link}
Autopilot jest zasilany przez BEC 5-6V wpięty w ostatnie złącze serw lub inne wolne.
Obsługuje wszystkie podstawowe konfiguracje platform z usterzeniem klasycznym i Rudlickiego, deltę i latąjace skrzydło.
