Autopilot Dedalus
Dokumentacja
Podręcznik użytkownika Autopilota Dedalus
Oprogramowanie
-> Download
- Wersja najnowsza
Firmware
-> Download
- Poprawiony błąd obsługi nietypowej komunikacji S-Bus
-> Download
- Poprawiony błąd inicjalizacji GPS. Wcześniej odbiornik przesyłał dane z domyślną prędkością 9600bps, po poprawce pracuje na prędkości ustawionej przez użytkownika
-> Download
- Umożliwia pracę bez wbudowanego magnetometru
-> Download
- Pierwsza wersja oficjalna
-> Download
- Poprawka zapisywania nastaw lotek
-> Download
- Wersja dla wyświetlacza zintegrowanego z klawiaturą
-> Download
- Wersja początkowa z samym wyświetlaczem OLED
Podstawową konfigurację autopilota wykonuje się za pomocą zmodyfikowanej wersji oprogramowania FPV Manager. Jest tak dlatego że Dedalus jest młodszym bratem autopilota z systemu FPV i duża część funkcjonalności jest wspólna. Oprogramowanie jest bardzo podobne, ale nie jest identyczne, więc oprogramowanie do obsługi Dedalusa należy pobrać ze strony "Do pobrania" przeznaczonej Dedalusowi.
W części Settings konfiguruje się podstawowe parametry dotyczące typu samolotu, rodzaju usterzenia, podstawowych parametrów lotu i nastaw stabilizacji.
W części poświęconej konfiguracji radia RC jest wybór rodzaju wejścia: równoległy, szeregowy PPM i SBus. Kolejna część pozwala na testowanie poprawności podłączenia sygnałów wejściowych oraz wyjściowych. Suwaki trymerów służą do ustawienia płaszczyzn sterujących w położeniu neutralnym.
Część poświęcona kalibracji służy do weryfikacji stanu czujników oraz ich kalibracji, tak aby wskazywały poprawne wartości. Czujniki są skalibrowane fabrycznie ale dobrą praktyką jest sprawdzić ich stan przed pierwszym lotem oraz okresowo co kilkadziesiąt lotów.
Panel Magnetometer pokazuje finalną wartość kursu magnetometru wewnętrznego opisaną jako "Heading". Sprawdzenie magnetometru polega na porównaniu wskazań ze znanymi kierunkami świata oraz na sprawdzeniu liniowości wskazań przy obracaniu autopilota o 360°. Kalibracja magnetometru może być uszkodzona przez magnesy, które czasami są używane do mocowania kabinki lub skrzydeł. W przypadku stwierdzenia nieliniowości wskazań lub odchyłki względem północy należy przeprowadzić kalibrację używając przycisku "Zero".
Panel Accelerometer pokazuje wskazania ±1g jako liczby w zakresie ±4096. Dla autopilota leżącego płasko na stole wskazania osi X i Y nie powinny być większe niż ± 50. Jeżeli wskazania odbiegają od normy, można je skalibrować wciskając przycisk "Zero XY". Autopilot powinien być nieruchomy w tym czasie.
Panel Gyroscope pokazuje prędkość kątową autopilota w 3 osiach. Dla nieruchomego autopilota powinna oscylować w okolicy zera. Jeżeli odbiega więcej niż 10 jednostek wtedy trzeba zrobić kalibrację. Pełna kalibracja polega na uchwyceniu wskazań dla 3 temperatur. Aby to zrobić należy autopilot umieścić w lodówce, tak aby schłodzić go do ok. 0°C. Schłodzony autopilot podłączamy do komputera przez USB i dla nieruchomo leżącego urządzenia naciskamy "Write min". Następnie czekamy aż urządzenie ogrzeje się do 25°C i naciskamy "Write mid". Finalnie podgrzewamy płytkę od spodu suszarką do włosów do 40°C i naciskamy "Write max".
W wersji uproszczonej można ograniczyć się do kalibracji tylko samej wartości "Write mid".
Kalibracja może zostać uszkodzona przez naprężenia mechaniczne, więc zwróć uwagę aby przewody podłączeniowe nie były naprężone i nic nie dotykało do autopilota.
Autopilot 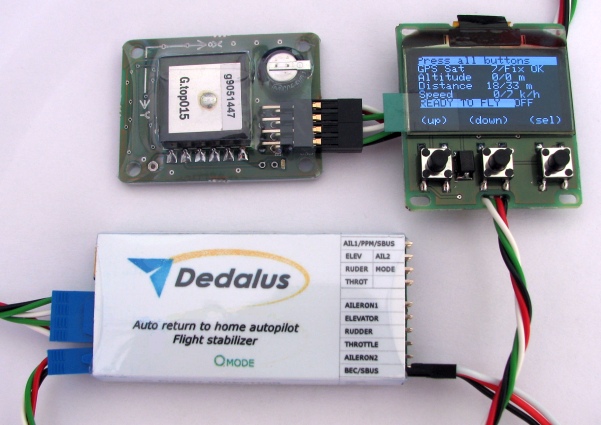 Dedalus został stworzony po to aby Twój model, w który sporo zainwestowałeś nie odleciał sobie gdzieś w nieznane z powodu banalnej przyczyny takiej jak utrata zasięgu sterowania, rozładowania baterii w nadajniku czy termiki wsysającej model w chmurę. Takie rzeczy zdarzają się każdemu, lecz mając na pokładzie Dedalusa jesteśmy w stanie doprowadzić Twój model z powrotem nad miejsce startu. Wskazane jest aby odbiornik RC był wyposażony w programowalny system Fail-Safe umożliwiający zaprogramowanie konkretnego stanu kanału odbiornika sterującego pracą autopilota w chwili utraty sygnału radiowego z nadajnika aparatury RC.
Dedalus został stworzony po to aby Twój model, w który sporo zainwestowałeś nie odleciał sobie gdzieś w nieznane z powodu banalnej przyczyny takiej jak utrata zasięgu sterowania, rozładowania baterii w nadajniku czy termiki wsysającej model w chmurę. Takie rzeczy zdarzają się każdemu, lecz mając na pokładzie Dedalusa jesteśmy w stanie doprowadzić Twój model z powrotem nad miejsce startu. Wskazane jest aby odbiornik RC był wyposażony w programowalny system Fail-Safe umożliwiający zaprogramowanie konkretnego stanu kanału odbiornika sterującego pracą autopilota w chwili utraty sygnału radiowego z nadajnika aparatury RC.
Po włączeniu Fail-Safe, lub ręcznym aktywowaniu trybu powrotu, autopilot wraca do miejsca startu i krąży wokół tego miejsca.
Dedalus jest mały (64mm długości, 30mm szerokości i 10mm wysokości) po to aby zmieścił się nawet w wąskim kadłubie szybowca. Na płytce zawiera komplet podstawowych czujników. Może sterować wszystkimi podstawowymi rodzajami płatowców:
- z usterzeniem klasycznym typu "T"
- z usterzeniem Rudlickiego typu "V",
- bezogonowcami typu latającym skrzydłem oraz deltą.
Mocując go w modelu pamiętaj że autopilot stabilizuje model w położeniu w jakim sam się znajduje, więc trzeba zamocować go stabilnie aby nie przemieszczał się w trakcie lotu (np. przyklejając go na "rzepa"). Musi być umieszczony prostopadle do osi wzdłużnej i poprzecznej modelu gdyż inaczej model będzie leciał pochylony lub przechylony. Niewielkie odchyłki wynikające z konstrukcji modelu mogą być skompensowane w konfiguracji autopilota.
Konfigurację Dedalusa robi się przez podłączony po USB komputer i aplikację FPV Manager działającą pod Windowsem, jednak czasami trzeba coś poprawić na lotnisku, sprawdzić status nawigacji satelitarnej, czy obejrzeć statystykę lotu. Do tego celu dołożyliśmy maleńki wyświetlacz z klawiaturą. Możesz z nim latać, ale może być podpinany tylko gdy będzie potrzebny. Z tego względu jeden wyświetlacz z klawiaturą wystarczy do wielu autopilotów.
Wyświetlacz można podłączać i odłączać w czasie pracy autopilota. Wtyczka wyświetlacza ma wypustki polaryzacyjne sugerujące właściwy sposób podłączenia.
Dedalusa do aparatury RC podłącza się na 3 różne sposoby:
- połączenie równoległe (przewód kanału 1 przenosi zasilanie i masę, pozostałe 2 przewody przenoszą tylko sygnały PWM kanałów 2, 3 i 4 oraz 5, 6 i 7),
- połączenie szeregowe CPPM pojedynczym przewodem kanału 1
- połączenie szeregowe S-bus pojedynczym przewodem kanału 1
Serwa płaszczyzn sterujących podłącza się bezpośrednio lub magistralą S-bus do ostatniego wyjścia.
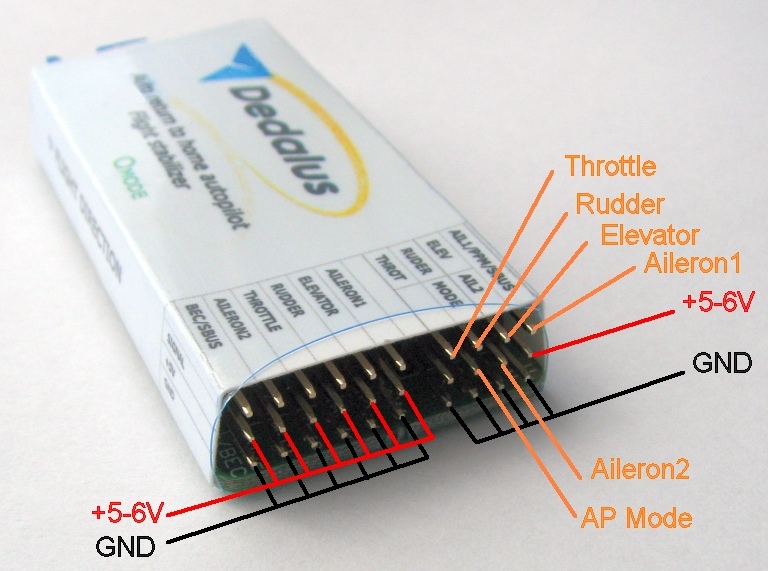
Dedalus zasilany jest z BEC o napięciu 5V lub 6V. Dobierający wydajność prądową zasilania do modelu, należy pamiętać że autopilot steruje dokładniej, ale przez to znacznie częściej porusza serwami niż człowiek, więc należy oczekiwać większego zużycia prądu niż w locie sterowanym ręcznie.
