Komputer pokładowy
Zagadnienia związane z komputerem pokładowym AutoPitLot
Firmware dla komputera pokładowego jest pisane w języku C na kontrolery ARM. Korzystamy ze środowiska programistycznego Rowley "CrossStudio for ARM". Jest na tyle efektywne i wygodne że warto zapłacić 150$ za osobistą licencję. kod powinien dać się skompilować na innych toochainach opartych na GNU, ale dawno nie próbowałem i uważam że lepiej jest poświęcić czas na efektywne programowanie niż na użeranie się z narzędziem.
Do programowania i debugowania korzystamy z interfejsu JTAG firmy Distortec. Bardzo sobie chwalę zarówno wcześniejszą wersję JTAG-lock-pick jak i nowszą, mniejszą JTAG-lock-pick Tiny 2.
Istnieje możliwość udostępnienia kodów źródłowych firmware. Jeżeli jesteś zainteresowany rozwojem komputera pokładowego, chcesz dodać do niego własną funkcjonalność lub po prostu zobaczyć jak to wygląda od środka skontaktuj się ze mną.
Zachęcam też do zapisania się na biuletyn poświęcony rozwojowi komputera pokładowego.
Aplikacja APL-GS pisana jest w Visual Studio. Ze względu na obecne zobowiązania nie jestem w stanie udostępnić kodów źródłowych.
Pojawi się wkrótce. Obecnie opisane w Instrukcji użytkownika
Moduły wewnętrzne:
- Moduł pneumatyczny
- Moduł inercyjny invensense
- Moduł inercyjny All-In-One
- Moduł inercyjny All-In-One 2
- Moduł inercyjny All-In-One 3
- Moduł ADCIO
Moduły zewnętrzne:
- Moduł GPS i magnetometru v2.0
- Moduł GPS-GLONASS i magnetometru
- Moduł Bluetooth
- Moduł FTDI
- Moduł radiomodemu Tiny One Pro
- Wyświetlacz OLED
- Czujnik prądu i napięcia
- Czujnik prędkości obrotowej
Opis złącz modułów
Quadrokopter PW wykorzytuje ramę koptera konkurencji. Ogólnie zgrabna i lekka konstrukcja, jedynym mankamentem są delikatne nogi, które łatwo uszkodzić gdy umiejętności pilotażu nie są jeszcze zbyt duże. Sposób montażu nóg nie zapewnia dobrego pozycjonowania platformy, przez co ciężko jest poprawnie skalibrować IMU po montażu na kopterze.
Wyposażenie quadrokoptera PW
| Element wyposażenia | Opis | Źródło zakupu |
|---|---|---|
| Pakiet | LiPo 3S 2200mAh | Hobbyking: Turnigy 2200mAh 3S 20C Lipo Pack |
| Czujnik prądu | 35A 36V | Pitlab: Czujnik prądu 35A |
| Regulatory silników | IFlight 30A, trochę przewymiarowane, ale wybrane ze względu na zgodność złącz Gold3,5mm z zakończeniami silników. | ABC-RC: ESC iFlight iQSS-30A 400Hz - SimonK firmware - fast PWM do quadcopterów - złacza Gold 3,5mm |
| Silniki | Roxxy 2827/26 | Robbe: ROXXY BL Outrunner 2827/26 |
| Śmigła | APC 10x3,8 |
ABC-RC: Śmigło APC 10x3,8 SFP - LP10038SFP - Pusher + Śmigło APC 10x3,8 SF - LP10038SF |
| Rama | Rama laminatowa z aluminiowymi ramionami | RRConcept: Rama Hornet-X4L |
| Sterownik | Komputer pokładowy Autopitlot + IMU Invensense + Moduł pneumatyczny | Pitlab |
| Odbiornik GNSS | Pitlab: Moduł GPS z magnetometrem HMC5883 | |
| Łącze komunikacyjne | moduł bluetooth krótkiego zasięgu | Pitlab: Moduł bluetooth UART |
| Interfejs użytkownika | Wyświetlacz OLED | RCTimer po modyfikacji |
| Link RC | Nadajnik Futaba, odbiornik Robbe R6007SP z szeregowym wyjściem PPM | OlPen: Odbiornik Futaba R6007SP 7-kanałowy 2,4GHz RASST odbiornik Serial |
| Zasilanie | BEC jednego z ESC | |
| Oświetlenie | brak |
Parametry eksploatacyjne
Masa RTF: ? g
Prąd zawisu: 9,48 A
Poniżej jest lista wielowirnikowców jakie latają ze sterownikiem APL. Staram się wyszczególnić podstawowe parametry konstrukcyjne, eksploatacyjne i nastawy regulatorów PID, tak aby tworzyć bazę wiedzy ułatwiającą nastrojenie następnych kopterów.
Lista kopterów
- Quadrokopter
- Hexakopter
- Quadrokopter "Darwin"
- Quadrokopter "PW"
- Quadrokopter "Transporter"
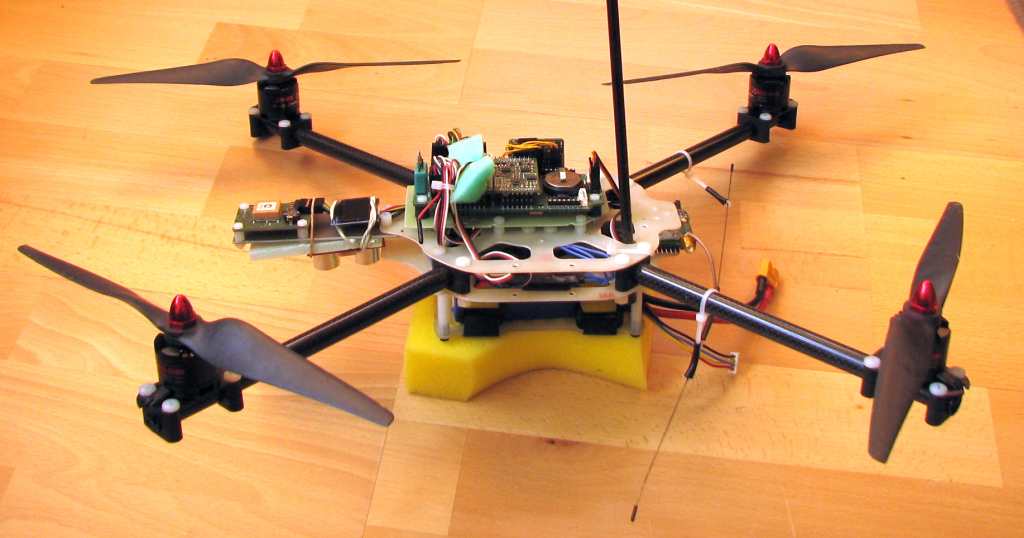
Quadrokopter Darwin jest nabytkiem z 2013 roku. Ramę dostałem od zaprzyjaźnionej firmy ArtFobia. Zrobiona jest z węglowych ramion, laminatowego centerplate. zamontowana na boom blokach i skręcona poliamidowymi śrubami - ani grama metalu w ramie, co przekłada się na małą masę wynoszącą 198 g.
Kopter na razie nie ma podwozia, siada na półce z pakietem. Widoczna na zdjęciu gąbka została założona do celów strojenia regulatorów wysokości, jako amortyzator, bo podczas strojenia można wpaść w oscylacje i niekontrolowanie przyziemić. Do normalnych lotów jest nieprzydatna, bo utrudnia poziome ustawienie koptera.
Wyposażenie quadrokoptera Darwin
| Element wyposażenia | Opis | Źródło zakupu |
|---|---|---|
| Pakiet | LiPo 3S 2200mAh | Hobbyking: Turnigy 2200mAh 3S 20C Lipo Pack |
| Czujnik prądu | 35A 36V | Pitlab: Czujnik prądu 35A |
| Regulatory silników | Turnigy Plush 18A na kontrolerze Silabs przeprogramowany na Fast PWM | Hobbyking: TURNIGY Plush 18amp Speed Controller |
| Silniki | Emax 2213-935KV | ABC-RC: Silnik Emax Multi-copter MT2213-935KV - 192W - EMAX |
| Śmigła | Gemfan 10x5 | ABC-RC: Śmigła GF 10x5R + 10x5 - Nylon + Carbon - duża sztywność |
| Rama | Ramiona z carbonowych rur 12mm | ArtFobia |
| Sterownik | Komputer pokładowy Autopitlot + IMU Invensense + Moduł pneumatyczny | Pitlab |
| Odbiornik GNSS | Pitlab: Moduł GPS z magnetometrem HMC5883 | |
| Łącze komunikacyjne | moduł bluetooth krótkiego zasięgu | Pitlab: Moduł bluetooth UART |
| Interfejs użytkownika | Wyświetlacz OLED | RCTimer po modyfikacji |
| Link RC | eLeReS 433MHz + antena dipol 1/4 z przeciwwagą | Cyberdrones: EleReS |
| Zasilanie | BEC z jednego z ESC | |
| Oświetlenie | brak |
Parametry eksploatacyjne
Masa RTF: 925g
Prąd zawisu: 8,515 A
Rozstaw silników po przekątnej: 470mm
