Komputer pokładowy AutoPitLot jest narzędziem służącym do badań nad autonomicznymi systemami sterowania Bezpilotowych Aparatów Latających (BAL). Urządzenie w obecnej fazie rozwoju steruje lotem wielowirnikowca automatycznie utrzymując równowagę i wysokość. Wykonuje pomiary kilkudziesięciu parametrów z czujników takich jak żyroskopy, akcelerometry, magnetometry, czujniki ciśnienia bezwzględnego i różnicowego, termometry. Następnie obrabia dane, licząc takie parametry jak kąty orientacji w przestrzeni 3-wymiarowej i finalnie przy pomocy zespołu 8 regulatorów PID stabilizuje położenie wielowirnikowca. Komputer mierzy, oblicza i uaktualnia komplet danych z częstotliwością 200Hz.
Komplet ponad 160 parametrów pomiarowych i obliczeniowych jest rejestrowany na karcie micro SD oraz niezależnie transmitowany na ziemię łączem telemetrycznym.
Kluczowe cechy
• Duża moc obliczeniowa dzięki 32-bitowemu mikrokontrolerowi ARM Cortex pracującemu na częstotliwości
96MHz,
• Obsługa wielu typów czujników w wymiennych modułach,
• Rejestracja na karcie micro SD ok. 200 parametrów lotu z częstotliwością do 175Hz,
• Obsługa 12 serw z możliwością rozszerzenia do 16,
• Komunikacja ze światem za pomocą szerokiego wachlarza interfejsów użytkownika: kabel, bluetooth,
radiomodem, OSD, komunikaty audio, wyświetlacz,
• Możliwość umieszczenia w wytrzymałej, hermetycznej obudowie z wygodnym dostępem od góry,
• Zawiera oprogramowanie APL-GS umożliwiające konfigurację i analizę danych on-line i off-line,
Schemat połączeń elementów komputera
Schemat blokowy komputera pokładowego AutoPitLot
Komputer jest konstrukcją modularną, w której wszystkie moduły pomiarowe mogą być wymieniane. Składa się z płyty głównej i uniwersalne modułów rozszerzających o znormalizowanych złączach. Budowa modularna ma na celu łatwiejsze dopasowanie konfiguracji sprzętu do finalnego zastosowania. Powinna również ułatwić wprowadzanie zmian i nowinek technologicznych. Złącza modułów posiadają dwa gniazda szpilkowe do dystrybucji zasilania i komunikacji.
Na płycie głównej znajduje się
- wydajny, 32-bitowy mikrokontroler ARM Cortex sterujący pracą całego układu,
- układy zasilania 3,3V, 5,0V oraz dystrybucja i pomiar prądu dla serwomechanizmów,
- sterowanie serwami (12 kanałów z możliwością rozbudowy do 18) i odczyt stanu 8 kanałów odbiornika RC,
- dwa wejścia obrotomierzy,
- gniazdo karty micro SD loggera,
- gniazdo mini USB do szybkiej komunikacji z aplikacją PC na ziemi,
- nieulotna pamięć konfiguracji,
- pamięć sampli i tor audio do generowania dźwięków i komunikatów głosowych przez zewnętrzny tor radiowy.
Tak wygląda płyta główna komputera w wersji 2.0 w obudowie.

W wersji 2.0 na płycie głównej znajdą się 3 gniazda modułów wewnętrznych i 4 złącza modułów zewnętrznych. Moduły wewnętrzne komunikują się z kontrolerem magistralami SPI (prędkość 12MHz) i I2C (do 1MHz). Dodatkowo każde gniazdo posiada 2 linie IO i komplet napięć zasilających. Moduły posiadają mechanizm identyfikacji, więc oprogramowanie może wykryć i obsłużyć moduł w dowolnym gnieździe.
W chwili obecnej zaprojektowane i wykonane w formie prototypów są następujące moduły wewnętrzne:
Moduły zewnętrzne to takie, które ze wzgledu na gabaryty, lub specjalne wymagania nie mogą znaleźć się na płycie głównej urządzenia. Złącza modułów zewnętrznych zawierają zestaw portów UART oraz I2C. Jeden z portów może być skonfigurowany jako magistrala CAN. Złącza zapewniają komunikację ze światem, umożliwiają debugowanie i podłączanie takich urządzeń jak:
- Odbiornik GPS ->patrz Moduł GPS
- Radiomodem (obecnie komputer obsługuje komunikację modemami Aerocomm AC4868-250M i One RF Tiny OnePro)
- OSD (obecnie obsługa OSD Remzibiego oraz OSD by Zbig&Pitlab)
- konwerter UART na USB, RS232 lub Bluetooth uzyskać port szeregowy do komunikacji z PC
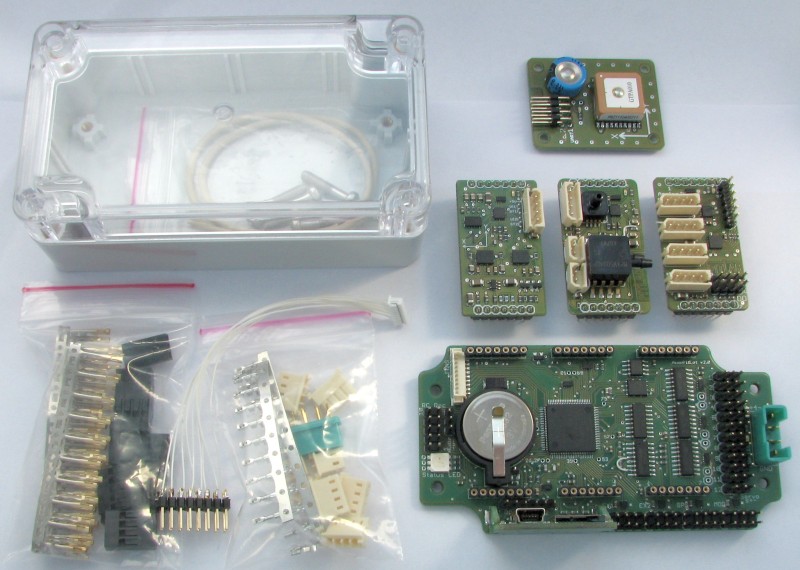
Zestaw do prac nad rozwojem projektu
Pliki do pobrania
Instrukcja użytkownika wersja z 21 października 2013
Wersja instalacyjna oprogramowania APL-GS 23,3MB, wersja 1.0.455 z 31 października 2013, wymaga DirectX
